
CAN 基础
拓扑结构
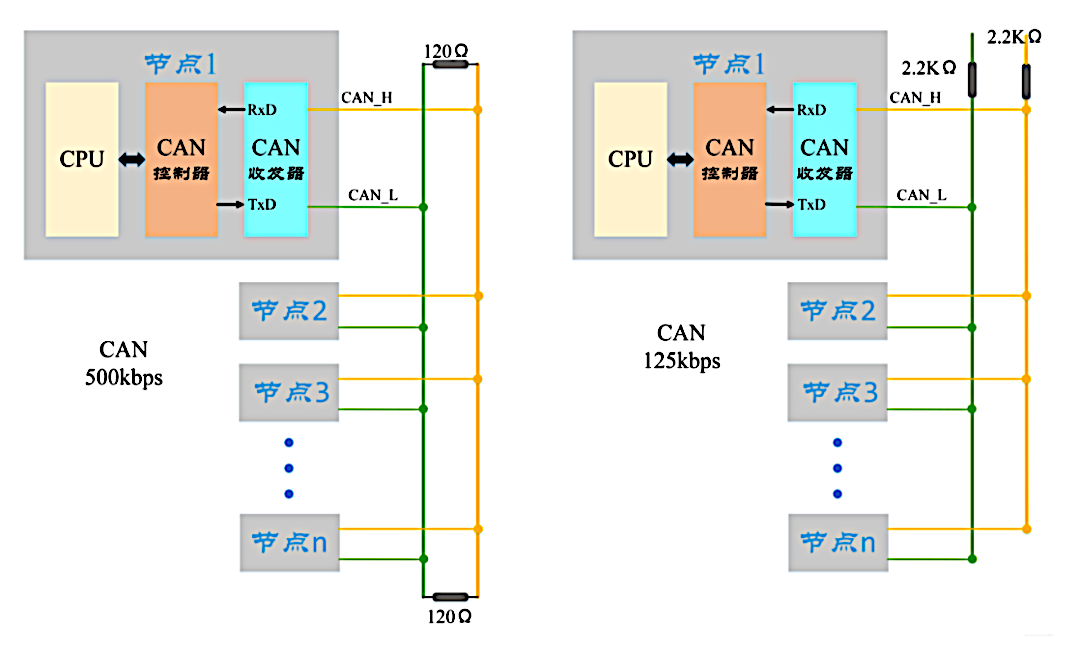
CAN 总线有两个 ISO 国际标准:ISO11898 和 ISO11519。
- ISO11898 定义了通信速率为 125 Kbps ~ 1 Mbps 的高速 CAN 通信标准,属于闭环总线,总线长度 ≤ 40 米。
- ISO11519 定义了通信速率为 10 ~ 125 Kbps 的低速 CAN 通信标准,属于开环总线,总线长度可达 1000 米。
- ISO16845 定义了认证需要的测试用例
- 在同一条总线上,所有节点的通信速度必须相同;如果两条不同通信速度的总线上的节点想要实现信息交互,必须通过网关或者中继器转发信息。
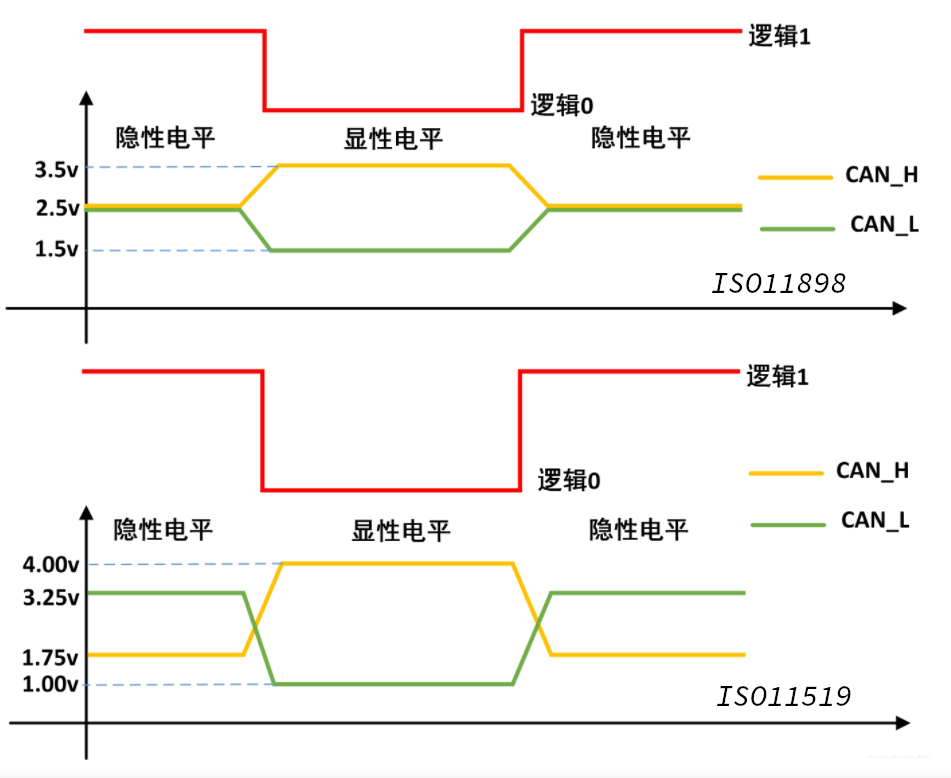
信号表示
通信特点
多主多从结构
- CAN 总线上的所有节点没有主从之分,在总线空闲状态,任意节点都可以向总线上发送消息
- 当总线上出现连续的 11 位隐形电平,那么总线就处于空闲状态
- 最先向总线发送消息的节点获得总线的发送权,当多个节点同时向总线发送消息时,所发送消息的优先级高的那个节点获得总线的发送权
- 依赖于硬件的验收滤波技术,CAN 总线可以实现一对一,一对多以及广播的数据传输方式。
非破坏性位仲裁机制
当多个节点同时向总线发送消息时,对各个消息的标识符(即 ID 号)进行逐位仲裁,如果某个节点发送的消息仲裁获胜,那么这个节点将获取总线的发送权,仲裁失败的节点则立即停止发送并转变为监听(接收)状态。
这种仲裁机制既不会造成已发送数据的延迟,也不会破坏已经发送的数据。
报文过滤
CAN 总线中没有地址的概念,CAN 总线是通过报文 ID 来实现收发数据的。每个节点上都会有一个验收滤波 ID 表,其位于 CAN 节点的验收滤波器中,如果总线上的报文的 ID 号在某个节点的验收滤波 ID 表中,那么这一帧报文就能通过该节点验收滤波器的验收,该节点就会接收这一帧报文。
远程数据请求
某个节点 Node_A 可以通过发送遥控帧到总线上的方式,请求某个节点 Node_B 来发送由该遥控帧所指定的报文。
出错处理
- 所有的节点都可以检测出错误
- 检测出错误的节点会立即通知总线上其它所有的节点
- 正在发送消息的节点,如果检测到错误,会立即停止当前的发送,同时不断地重复发送此消息,直到该消息发送成功为止
故障封闭
节点能够判断错误的类型,判断是暂时性的数据错误(如噪声干扰)还是持续性的数据错误(如节点内部故障),如果判断是严重的持续性错误,那么节点就会切断自己与总线的联系,从而避免影响总线上其他节点的正常工作。
位填充
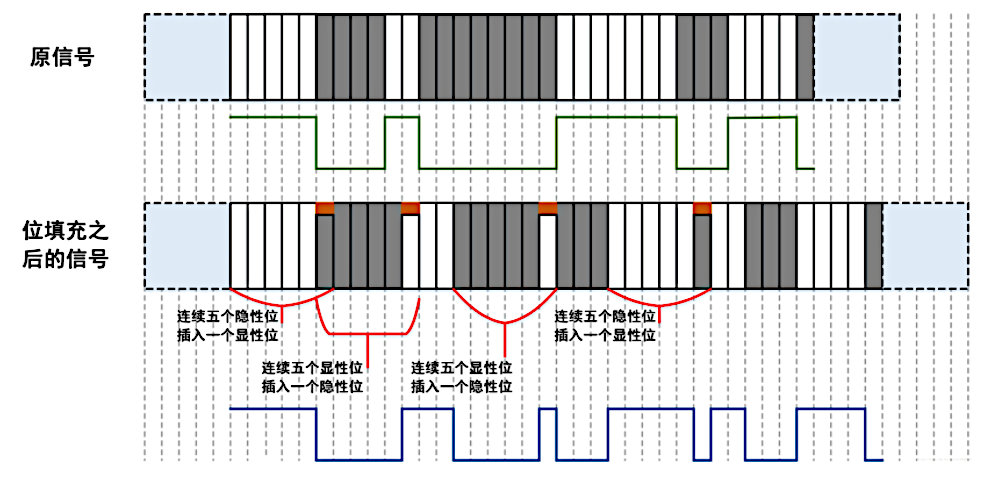
CAN 协议中规定,当相同极性的电平持续五位时,则添加一个极性相反的位。
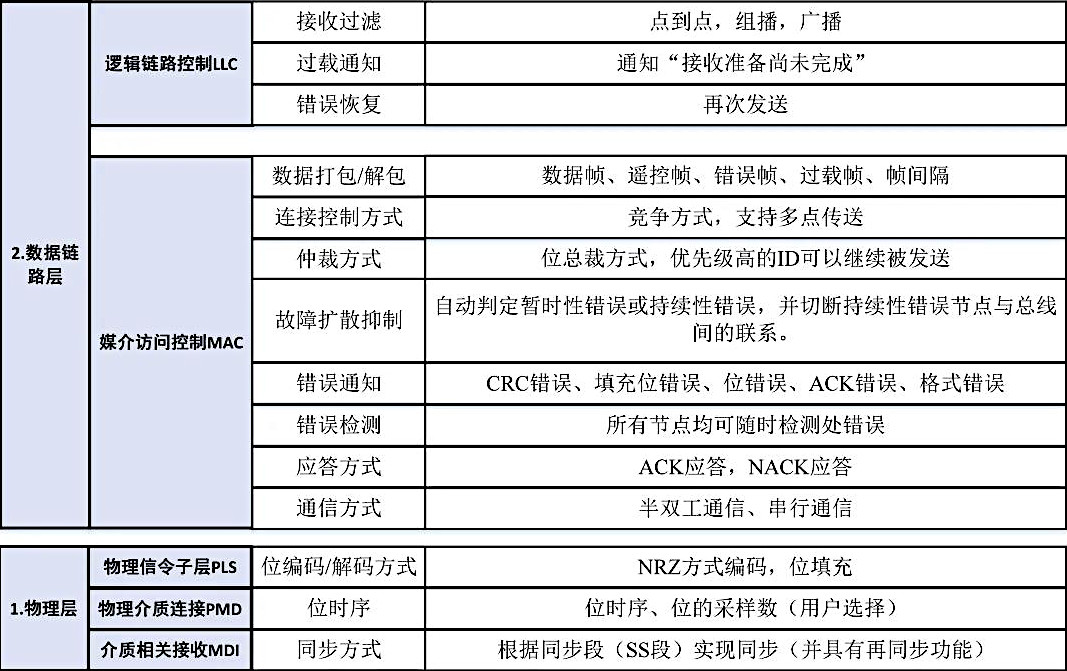
网络分层架构
帧结构
数据帧和遥控帧
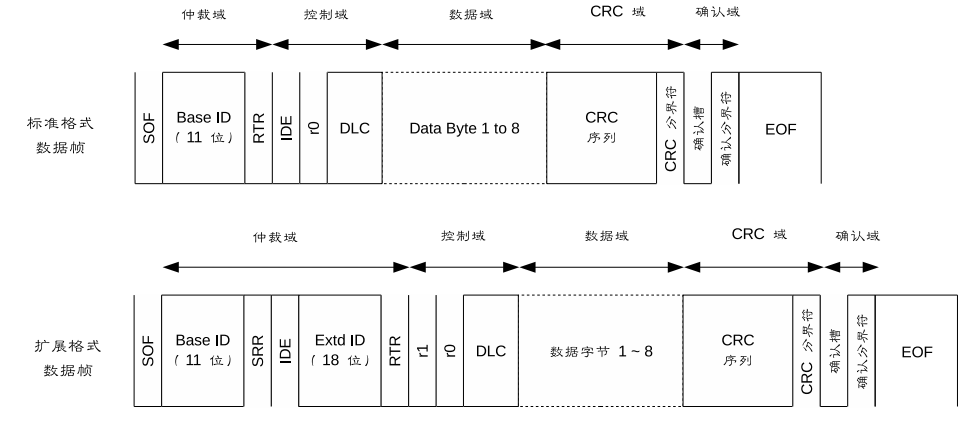
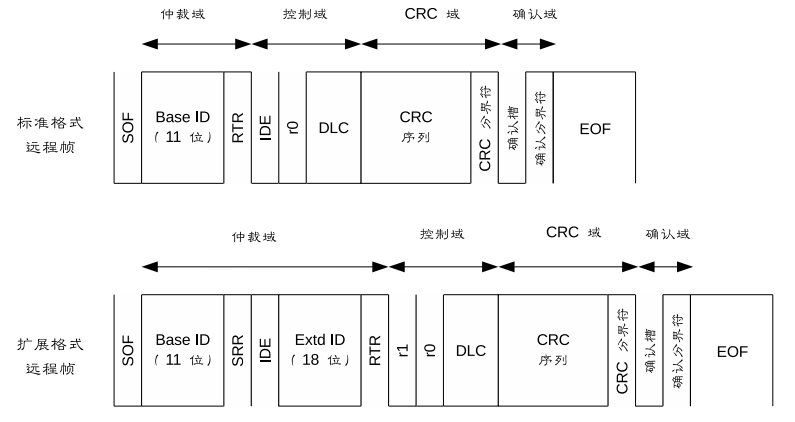
- RTR(Remote Transmission Request) 位保证了数据帧的优先级高于遥控帧
- SRR(Substitutes Remote Requests) 位保证了标准数据帧的优先级高于扩展数据帧
- IDE(Identifier Extension) 位保证了标准遥控帧的优先级高于扩展遥控帧
- DLC(Data Length Code) 位指示了数据段中的字节数,对于遥控帧而言,DLC 表示该遥控帧对应的数据帧的数据段的字节数
- 数据段从 MSB 开始输出
- CRC 校验序列(15bit)的计算范围包括:SOF,仲裁段,控制段和数据段
- ACK 包括 ACK 槽和 ACK 分界符:
- 发送节点发出的报文中 ACK 槽为
隐性1 - 接收节点在接收到正确的报文之后会在 ACK 槽发送
显性0,通知发送节点正常接收结束
- 发送节点发出的报文中 ACK 槽为
- EOF(End Of Frame) 表示该帧报文的结束,由 7 个隐性位构成
错误帧
在 CAN 总线通信中,一共有五种错误,分别是:位错误、ACK 错误、填充错误、CRC 错误、格式错误。

- 主动错误标志:6 个连续的显性位 0
- 被动错误标志:6 个连续的隐性位 1
- 错误分界符:8 个连续的隐性位 1
过载帧

- 接受单元会发从此帧来通知总线自己还没有做好接收准备
帧间隔
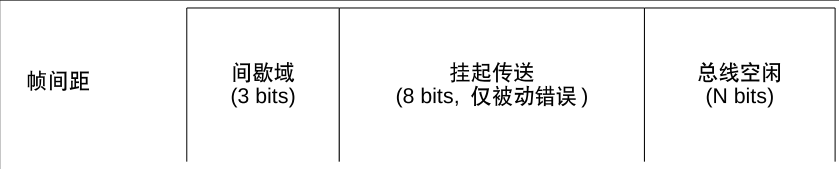
- 数据帧和遥控帧可通过插入帧间隔将本帧与前面的任何帧(数据帧、遥控帧、错误帧、过载帧)分开,过载帧和错误帧前不能插入帧间隔
错误通知
节点错误状态
按照 CAN 协议的规定,CAN 总线上的节点始终处于以下三种状态之一:
-
主动错误状态
- 可以正常通信
- 在检测出错误时,发出主动错误标志
-
被动错误状态
- 可以正常通信
- 在检测出错误时,发出被动错误标志
-
总线关闭状态
- 节点不能收发报文
- 在满足一定条件的时候,再次进入到主动错误状态
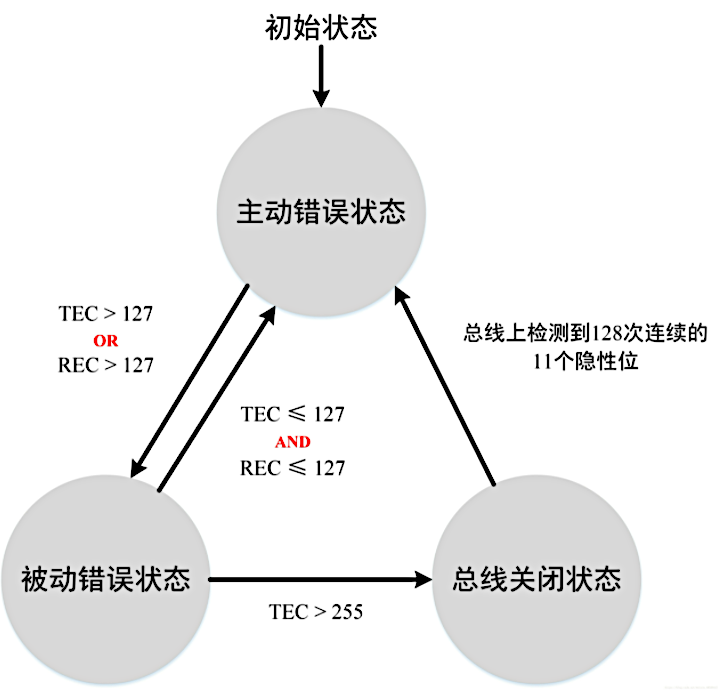
错误状态的转换
在 CAN 节点内,有两个计数器:发送错误计数器(TEC)和接收错误计数器(REC)。TEC 和 REC 计数值的变化,是根据下表的规定来进行的
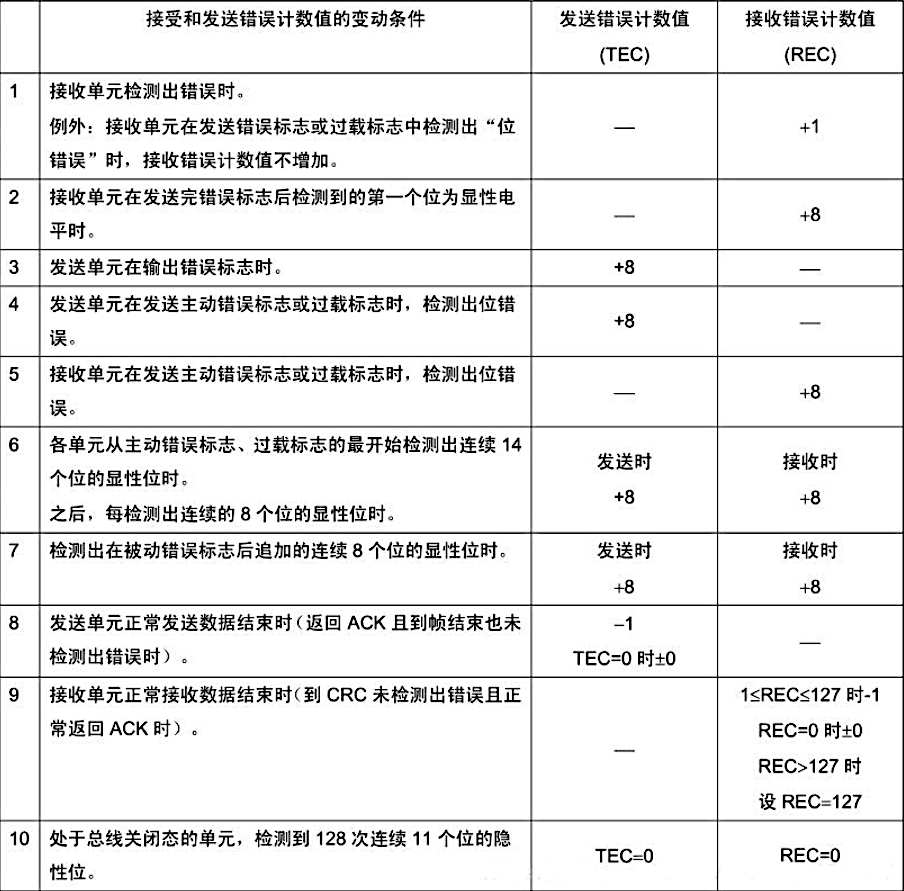
CAN 节点错误状态的转换,就是基于这两个计数器来进行的
错误帧的发送
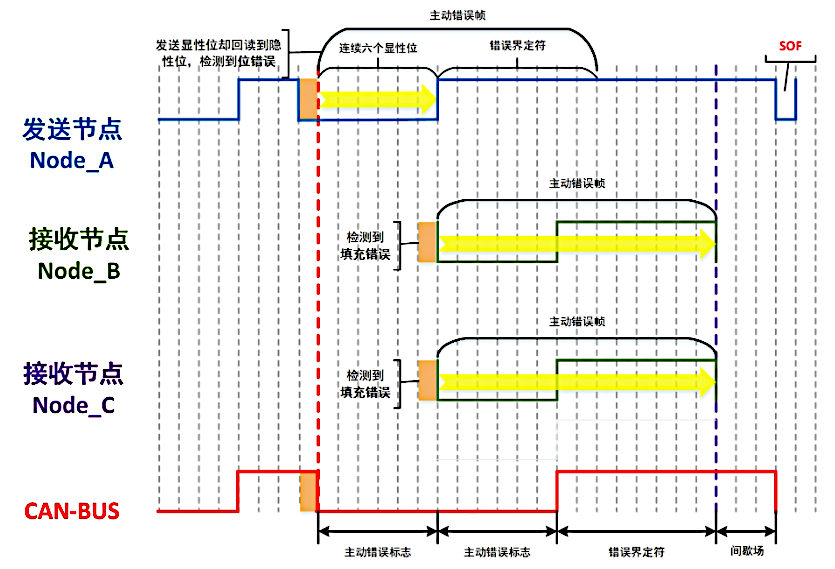
- 发送节点 Node_A 发送一个显性位,但是却从总线上听到一个隐形位,于是 Node_A 节点就会检测到一个位错误
- Node_A 检测到位错误之后,立即在下一位开始发送主动错误帧:6 个连续显性位的主动错误标志+8 个连续隐性位的错误界定符
- 对应 Node_A 发出的主动错误标志,总线上电平为 6 个连续显性位
- 接收节点 Node_B 和 Node_C 从总线上听到连续 6 个显性位,那么就会检测到一个填充错误,于是这两个节点都会发送主动错误帧
- 对应 Node_B 和 Node_C 发出的主动错误标志,总线电平又有 6 个连续显性电平,对应 Node_B 和 Node_C 发出的错误界定符,总线电平有 8 个连续的隐性电平
- 在间歇域之后,Node_A 节点重新发送刚刚出错的报文